Rotational Axes of Tilted Conics: From Asymptotes to the Double-Angle Formula
Background
Every conic section (ellipse, hyperbola, parabola) has symmetry axes – the directions along which it looks the “simplest.” When the conic is aligned with the coordinate axes, these are just the \(x\)- and \(y\)-axes. But when a conic is tilted (the equation contains an \(xy\) term), finding those hidden axes of symmetry becomes a real puzzle.
In earlier sessions, we learned how to classify conics using the \(2 \times 2\) matrix of the quadratic form, and how to use rotational matrices to eliminate the \(xy\) term. Today we tie everything together: we derive a single, elegant formula for the rotation angle \(\theta\) that reveals the symmetry axes, prove it works even when there are no asymptotes (the ellipse case), and walk through a concrete numerical example. Along the way, we use Vieta’s formulas, complex numbers, and a beautiful geometric trick that replaces \(y\) with \(yi\) to unify hyperbolas and ellipses.
In physics, the principal axes of a stress tensor or moment-of-inertia tensor are found by exactly this technique. In data science, PCA (Principal Component Analysis) is the same rotation applied to covariance matrices. Understanding this is a gateway to linear algebra, which is the language of modern science and engineering.
Lecture Video
- The quadratic form matrix \(\begin{pmatrix} a & b \\ b & c \end{pmatrix}\) encodes the conic \(ax^2 + 2bxy + cy^2 = d\); its determinant classifies the type (ellipse vs. hyperbola)
- Double-angle formula for the rotation: \(\tan(2\theta) = \dfrac{2b}{a - c}\) gives the angle of the symmetry axes
- Vieta’s formulas let us bypass solving for individual slopes \(k_1, k_2\) – we plug the sum and product directly
- Coordinate rotation vs. axis rotation: rotating the axes by \(+\theta\) means rotating the coordinates by \(-\theta\)
- The \(yi\) trick: replacing \(y\) with \(yi\) turns an ellipse into a hyperbola, proving the rotation formula works universally via the “bounding box” diagonal argument
The Quadratic Form and Its Matrix
A general second-degree equation in \(x\) and \(y\) (centered at the origin) can be written:
\[ax^2 + 2bxy + cy^2 = d\]
We package the coefficients into a symmetric matrix:
\[M = \begin{pmatrix} a & b \\ b & c \end{pmatrix}\]
The determinant \(\det(M) = ac - b^2\) tells us the type:
| Determinant | Conic Type |
|---|---|
| \(ac - b^2 > 0\) | Ellipse (no real asymptotes) |
| \(ac - b^2 < 0\) | Hyperbola (two real asymptotes) |
| \(ac - b^2 = 0\) | Parabola / degenerate |
The expression \(ax^2 + 2bxy + cy^2\) can be written as a matrix product:
\[\begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} a & b \\ b & c \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = ax^2 + 2bxy + cy^2\]
Finding the symmetry axes of the conic is equivalent to finding the eigenvectors of the matrix \(M\). This is the central problem of linear algebra: diagonalizing a symmetric matrix. Everything we do today is an introduction to that idea.
Deriving the Rotation Angle from Asymptotes
Step 1: Finding asymptote slopes via \(k = y/x\)
For a hyperbola, the asymptotes pass through the origin. Setting \(ax^2 + 2bxy + cy^2 = 0\) and dividing by \(x^2\):
\[ck^2 + 2bk + a = 0 \quad \text{where } k = \frac{y}{x}\]
The two roots \(k_1, k_2\) are the slopes of the two asymptotes.
Step 2: Vieta’s formulas bypass explicit solutions
By Vieta’s formulas applied to the quadratic \(ck^2 + 2bk + a = 0\):
\[k_1 + k_2 = -\frac{2b}{c}, \qquad k_1 \cdot k_2 = \frac{a}{c}\]
Step 3: The symmetry axes bisect the asymptotes
The major and minor axes of a conic are the angle bisectors of the asymptotes. If \(\theta\) is the angle of a symmetry axis, then:
\[\theta = \frac{1}{2}\bigl(\arctan k_1 + \arctan k_2\bigr)\]
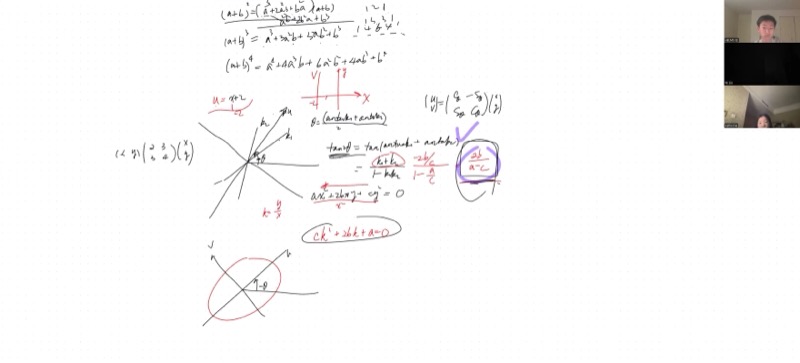
Step 4: Apply the tangent addition formula
\[\tan(2\theta) = \tan\bigl(\arctan k_1 + \arctan k_2\bigr) = \frac{k_1 + k_2}{1 - k_1 k_2}\]
Substituting from Vieta’s:
\[\tan(2\theta) = \frac{-2b/c}{1 - a/c} = \frac{-2b}{c - a} = \frac{2b}{a - c}\]
\[\boxed{\tan(2\theta) = \frac{2b}{a - c}}\]
This single formula gives the rotation angle of the symmetry axes for any conic \(ax^2 + 2bxy + cy^2 = d\), whether elliptical or hyperbolic.
Coordinate Rotation: Mind the Sign
When we rotate the axes (\(u\)-\(v\) frame) by angle \(+\theta\) relative to \(x\)-\(y\), the coordinate transformation uses angle \(-\theta\):
\[\begin{pmatrix} u \\ v \end{pmatrix} = \begin{pmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}\]
Consider the simplest case: \(u = x + 2\). The \(u\)-axis origin is shifted right by 2 in the \(x\)-world. But to convert, you need to subtract: a point at \(x = 2\) maps to \(u = 0\). The coordinate transformation always goes in the opposite direction of the geometric transformation.
Similarly, rotating the axes forward by \(\theta\) means each point’s new coordinates are obtained by rotating its position vector backward by \(\theta\).
Why the Formula Works for Ellipses Too
For a hyperbola (\(ac - b^2 < 0\)), the asymptotes are real and the geometric argument is clear. But for an ellipse (\(ac - b^2 > 0\)), the quadratic \(ck^2 + 2bk + a = 0\) has no real roots – there are no real asymptotes!
The Bounding Box Argument
Every conic lives inside (ellipse) or outside (hyperbola) a bounding box aligned with its symmetry axes.
Drag the \(\theta_0\) slider to tilt the ellipse. The dashed lines show the symmetry axes, which always bisect the diagonals of the bounding box.
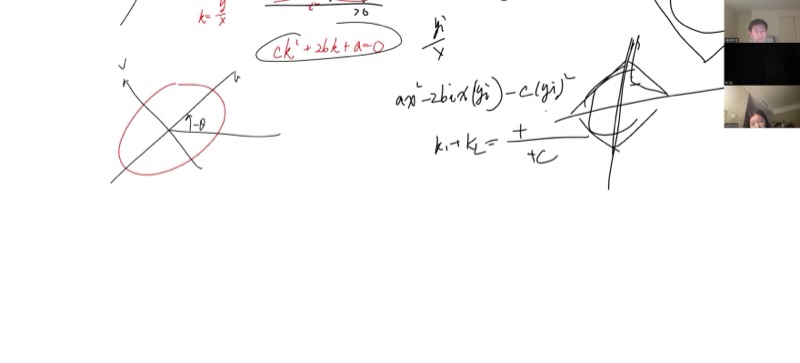
The \(yi\) Substitution Trick
The key insight: replace \(y\) with \(yi\) (where \(i = \sqrt{-1}\)). The equation:
\[ax^2 + 2bxy + cy^2 = d\]
becomes:
\[ax^2 + 2b(xi)(yi)/i + c(yi)^2/(-1) \;\longrightarrow\; ax^2 - 2bi \cdot x(yi) - c(yi)^2 = d\]
Wait – let’s be precise. If we set \(w = yi\), then \(y = w/i = -wi\), and:
\[ax^2 + 2bx(-wi) + c(-wi)^2 = ax^2 - 2bwi \cdot x + c w^2 \cdot (-1)\]
Starting from \(ax^2 + 2bxy + cy^2 = d\) with \(ac - b^2 > 0\) (ellipse), substitute \(y \to yi\):
\[ax^2 + 2bx(yi) + c(yi)^2 = d\] \[ax^2 + 2bi \cdot xy - cy^2 = d\]
The coefficient of \(y^2\) flips sign: \(+c \to -c\). Since \(c > 0\) originally, the new “discriminant” becomes \(a(-c) - (bi)^2 = -ac - (-b^2) = b^2 - ac < 0\), which means the transformed equation is hyperbolic.
Now this new hyperbola has real asymptotes with slopes \(k_1, k_2\) (in the \(x\)-\(yi\) plane). These slopes give the diagonals of the bounding box for the original ellipse. The angle bisectors of these diagonals are still the symmetry axes.
When we compute \(k_1 + k_2\) and \(k_1 k_2\) using Vieta’s on the transformed equation, the factors of \(i\) cancel in the final formula \(\tan(2\theta) = \frac{2b}{a-c}\), giving the same real answer.
This is why the formula is universal: the algebra does not care whether the roots are real or complex. The formula \(\tan(2\theta) = \frac{2b}{a-c}\) emerges from the coefficients alone.
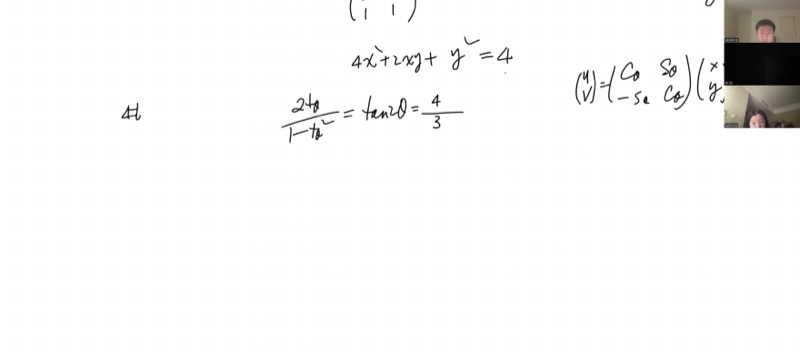
Worked Example: \(4x^2 + 2xy + y^2 = 4\)
Let’s apply the full algorithm to an elliptical conic.
Step 1: Identify the matrix and type
\[M = \begin{pmatrix} 4 & 1 \\ 1 & 1 \end{pmatrix}, \quad \det(M) = 4 \cdot 1 - 1^2 = 3 > 0 \implies \text{Ellipse}\]
Step 2: Find the rotation angle
\[\tan(2\theta) = \frac{2b}{a - c} = \frac{2(1)}{4 - 1} = \frac{2}{3}\]
We need the individual trig values to build the rotation matrix. Use the double-angle identity:
\[\tan(2\theta) = \frac{2\tan\theta}{1 - \tan^2\theta} = \frac{2}{3}\]
Let \(t = \tan\theta\). Cross-multiplying:
\[3 \cdot 2t = 2(1 - t^2) \implies 6t = 2 - 2t^2 \implies 2t^2 + 6t - 2 = 0 \implies t^2 + 3t - 1 = 0\]
By the quadratic formula:
\[t = \frac{-3 \pm \sqrt{9 + 4}}{2} = \frac{-3 \pm \sqrt{13}}{2}\]
The two roots correspond to the two symmetry axes. We pick the smaller angle (larger cosine), so we take:
\[\tan\theta = \frac{-3 + \sqrt{13}}{2} \approx 0.303\]
From tangent to cosine: Use the identity \(1 + \tan^2\theta = \sec^2\theta = \frac{1}{\cos^2\theta}\):
\[\cos^2\theta = \frac{1}{1 + t^2} = \frac{1}{1 + \frac{22 - 6\sqrt{13}}{4}} = \frac{4}{26 - 6\sqrt{13}}\]
Rationalizing:
\[\cos^2\theta = \frac{4(26 + 6\sqrt{13})}{(26)^2 - (6\sqrt{13})^2} = \frac{4(26 + 6\sqrt{13})}{676 - 468} = \frac{4(26 + 6\sqrt{13})}{208} = \frac{26 + 6\sqrt{13}}{52}\]
Then \(\sin\theta = \tan\theta \cdot \cos\theta\), giving both components of the rotation matrix.
Step 4: Verify on Desmos
The tilted ellipse \(4x^2 + 2xy + y^2 = 4\) with its symmetry axes computed from \(\tan(2\theta) = 2/3\). The dashed lines pass through the vertices and co-vertices.
Step 5: Build the rotation matrix
Once you have \(\cos\theta\) and \(\sin\theta\), the new coordinates are:
\[u = x\cos\theta + y\sin\theta, \qquad v = -x\sin\theta + y\cos\theta\]
In the \((u, v)\) frame, the cross-term vanishes and the conic takes its standard form \(\frac{u^2}{A^2} + \frac{v^2}{B^2} = 1\).
The Full Algorithm (Summary)
Given \(ax^2 + 2bxy + cy^2 = d\):
Classify: compute \(\Delta = ac - b^2\). If \(\Delta > 0\): ellipse. If \(\Delta < 0\): hyperbola.
Rotation angle: \(\tan(2\theta) = \dfrac{2b}{a - c}\) (if \(a = c\), then \(\theta = \pi/4\)).
Find \(\tan\theta\): solve \(t^2 + \frac{a-c}{b} \cdot t - 1 = 0\) (from the double-angle identity).
Find \(\cos\theta, \sin\theta\): from \(\cos^2\theta = \frac{1}{1 + \tan^2\theta}\), then \(\sin\theta = \tan\theta \cdot \cos\theta\).
Rotate: \(u = x\cos\theta + y\sin\theta\), \(v = -x\sin\theta + y\cos\theta\).
Substitute into the original equation: the \(uv\) cross-term will be zero, leaving a standard-form conic.
Comparing Three Approaches
The lesson highlighted three different ways to find the same rotation angle:
| Approach | Method | Best for |
|---|---|---|
| Rotational matrix | Set the \(uv\) coefficient to zero after substituting | Full rigor from first principles |
| Asymptote bisection | Factor the homogeneous part, find slopes, bisect | Hyperbolas with geometric intuition |
| Vieta + double-angle | Use \(k_1 + k_2\) and \(k_1 k_2\) directly in \(\tan(2\theta)\) | Quick computation, no factoring needed |
All three yield the same result: \(\tan(2\theta) = \frac{2b}{a - c}\).
Using AI as a Mathematical Tool
An interesting segment of this lesson involved asking ChatGPT to prove that the rotation formula works for ellipses (where there are no real asymptotes). Key takeaways:
- Formulate your question precisely – rigorous input gets rigorous output
- Ask for elegant shortcuts – after seeing one proof, request alternatives
- Verify the reasoning yourself – AI can make subtle logical errors
- Use tools like Grammarly to improve your mathematical writing
Key Video Frames
Cheat Sheet
| Concept | Formula / Rule |
|---|---|
| Quadratic form matrix | \(M = \begin{pmatrix} a & b \\ b & c \end{pmatrix}\) for \(ax^2 + 2bxy + cy^2\) |
| Conic classification | \(ac - b^2 > 0\): ellipse; \(< 0\): hyperbola; \(= 0\): parabola |
| Rotation angle | \(\tan(2\theta) = \dfrac{2b}{a - c}\) |
| Vieta’s (slope quadratic) | \(k_1 + k_2 = -\frac{2b}{c}\), \(\quad k_1 k_2 = \frac{a}{c}\) |
| Coordinate rotation | \(u = x\cos\theta + y\sin\theta\), \(\quad v = -x\sin\theta + y\cos\theta\) |
| From \(\tan\theta\) to \(\cos\theta\) | \(\cos^2\theta = \frac{1}{1 + \tan^2\theta}\) |
| Double-angle identity | \(\tan(2\theta) = \frac{2\tan\theta}{1 - \tan^2\theta}\) |
| Axes vs. coordinates | Rotating axes by \(+\theta\) \(\iff\) rotating coordinates by \(-\theta\) |
Quick Reference: Tilted Conic Algorithm
- Read off \(a\), \(b\), \(c\) from the quadratic form
- Compute \(\tan(2\theta) = \frac{2b}{a - c}\)
- Solve for \(\tan\theta\) via \(t^2 + \frac{a-c}{b}t - 1 = 0\)
- Convert to \(\cos\theta\), \(\sin\theta\) using Pythagorean identity
- Rotate coordinates and simplify to standard form