特征值、特征向量与正交矩阵对角化
课程视频
背景介绍
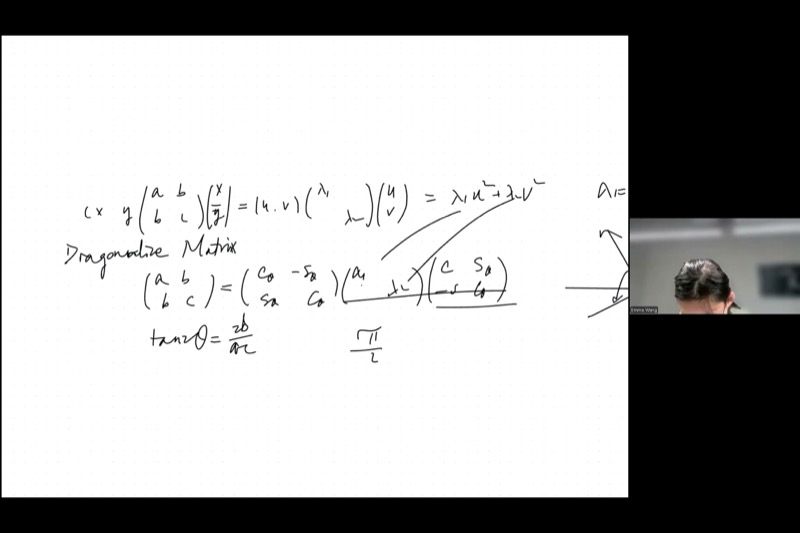
考虑一个二次表达式 \(3x^2 + 4xy + y^2\)。由于 \(xy\) 交叉项的存在,它看起来很复杂——无法立即判断这个方程描述的是椭圆、双曲线还是抛物线。但如果可以旋转坐标轴使交叉项消失,留下像 \(\lambda_1 u^2 + \lambda_2 v^2\) 这样简洁的形式呢?
这正是矩阵对角化所实现的。每个对称矩阵都可以通过旋转”解开”为一个对角矩阵,其元素——特征值——揭示了隐藏在原始表达式中的真实几何。旋转方向由特征向量给出,旋转矩阵是一个正交矩阵,其逆矩阵就是它的转置。
本课将之前几节课的线索汇集在一起:二次型、旋转矩阵、用于求旋转角度的正切公式,以及两个强大的不变量(迹和行列式),它们使得无需计算旋转就能找到特征值。到最后,我们将看到方程 \(M\vec{\varepsilon} = \lambda\vec{\varepsilon}\) 如何定义特征值和特征向量——这是数学和物理中最重要的方程之一。
- 二次型即矩阵:表达式 \(ax^2 + 2bxy + cy^2\) 编码在对称矩阵 \(\begin{pmatrix} a & b \\ b & c \end{pmatrix}\) 中,称为度量张量。
- 通过旋转对角化:对称 \(2 \times 2\) 矩阵总可以被对角化:\(M = R(-\theta)\begin{pmatrix}\lambda_1 & 0 \\ 0 & \lambda_2\end{pmatrix}R(\theta)\),其中 \(R(\theta)\) 是旋转矩阵。
- 两个不变量求特征值:迹 \(\lambda_1 + \lambda_2 = a + c\) 和行列式 \(\lambda_1 \lambda_2 = ac - b^2\) 在旋转下不变,因此无需计算 \(\theta\) 即可找到 \(\lambda_1, \lambda_2\)。
- 正交矩阵:列向量为标准正交向量的矩阵满足 \(O^T O = I\),即 \(O^{-1} = O^T\)。旋转矩阵就是正交矩阵。
- 特征值方程:基本关系 \(M\vec{\varepsilon} = \lambda\vec{\varepsilon}\) 表明用 \(M\) 乘以特征向量 \(\vec{\varepsilon}\) 只是将其按特征值 \(\lambda\) 缩放。
从二次型到矩阵
每个二元二次表达式都可以用对称矩阵表示:
\[ax^2 + 2bxy + cy^2 = \begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} a & b \\ b & c \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}\]
矩阵 \(M = \begin{pmatrix} a & b \\ b & c \end{pmatrix}\) 称为度量张量——它编码了一种”扭曲”的测距方式。在普通欧几里得几何中,距离为 \(x^2 + y^2\)(勾股定理)。一般度量允许加权项和混合项。
考虑 \(2x^2 + 6xy + 5y^2 = 1\)。矩阵为:
\[M = \begin{pmatrix} 2 & 3 \\ 3 & 5 \end{pmatrix}\]
为了分类这条圆锥曲线,我们使用两个不变量求特征值:
- 迹:\(\lambda_1 + \lambda_2 = 2 + 5 = 7\)
- 行列式:\(\lambda_1 \lambda_2 = (2)(5) - 3^2 = 1\)
因此 \(\lambda_1\) 和 \(\lambda_2\) 满足 \(\lambda^2 - 7\lambda + 1 = 0\),解得 \(\lambda = \frac{7 \pm \sqrt{45}}{2} = \frac{7 \pm 3\sqrt{5}}{2}\)。
两个特征值都为正,所以这条圆锥曲线是椭圆。
当特征值异号时
\(\lambda_1, \lambda_2\) 的符号模式决定了圆锥曲线类型:
| 特征值符号 | 圆锥曲线类型 | 示例度量 |
|---|---|---|
| 都为正 | 椭圆 | 标准距离 |
| 都为负 | 椭圆(反向) | 负定 |
| 异号 | 双曲线 | 闵可夫斯基度量(\(\lambda_1 = 1, \lambda_2 = -1\)) |
| 一个为零 | 抛物线 | 退化情况 |
在爱因斯坦的相对论中,时空使用的是闵可夫斯基度量,其中 \(\lambda_1 = 1\) 和 \(\lambda_2 = -1\)。这产生了双曲几何,其中”距离” \(t^2 - x^2\) 可以为负——这与日常的欧几里得几何截然不同,却支配着我们宇宙的结构。
对角化:求特征值的两条路径
有两种方法来对角化矩阵 \(M = \begin{pmatrix} a & b \\ b & c \end{pmatrix}\)。
路径 1:先求旋转角度
根据上一课的内容,消除交叉项的旋转角度 \(\theta\) 满足:
\[\tan(2\theta) = \frac{2b}{a - c}\]
这个方程在 \(2\theta\) 上以 \(\pi\) 为周期,因此 \(\theta\) 以 \(\frac{\pi}{2}\) 为周期。如果 \(\theta\) 是一个解,那么 \(\theta + \frac{\pi}{2}\) 也是解——这很合理,因为交换两个轴(90 度旋转)只是交换了 \(\lambda_1\) 和 \(\lambda_2\)。
求出 \(\theta\) 后,计算 \(\cos\theta\) 和 \(\sin\theta\),代入旋转后的矩阵,读出 \(\lambda_1, \lambda_2\)。这种方法可行,但涉及大量三角代数运算。
路径 2:使用不变量(跳过角度!)
更简洁的方法使用两个在旋转下不变的量:
\[\boxed{\lambda_1 + \lambda_2 = a + c \qquad \text{(迹)}}\]
\[\boxed{\lambda_1 \lambda_2 = ac - b^2 \qquad \text{(行列式)}}\]
这两个方程可直接求解 \(\lambda_1\) 和 \(\lambda_2\)——无需三角函数。它们是特征多项式的根:
\[\lambda^2 - (a+c)\lambda + (ac - b^2) = 0\]
调整上面的 \(a\)、\(b\)、\(c\) 滑块,观察不同的矩阵元素如何改变圆锥曲线。当行列式 \(ac - b^2\) 为正时,得到椭圆;为负时,得到双曲线。
给定 \(M = \begin{pmatrix} 5 & 2 \\ 2 & 1 \end{pmatrix}\):
迹: \(\lambda_1 + \lambda_2 = 5 + 1 = 6\)
行列式: \(\lambda_1 \lambda_2 = 5 \cdot 1 - 2^2 = 1\)
特征多项式: \(\lambda^2 - 6\lambda + 1 = 0\)
\[\lambda = \frac{6 \pm \sqrt{36 - 4}}{2} = \frac{6 \pm \sqrt{32}}{2} = 3 \pm 2\sqrt{2}\]
因此 \(\lambda_1 = 3 + 2\sqrt{2} \approx 5.83\),\(\lambda_2 = 3 - 2\sqrt{2} \approx 0.17\)。都为正,所以二次型定义了一个椭圆。
证明迹不变性
将对角化展开:
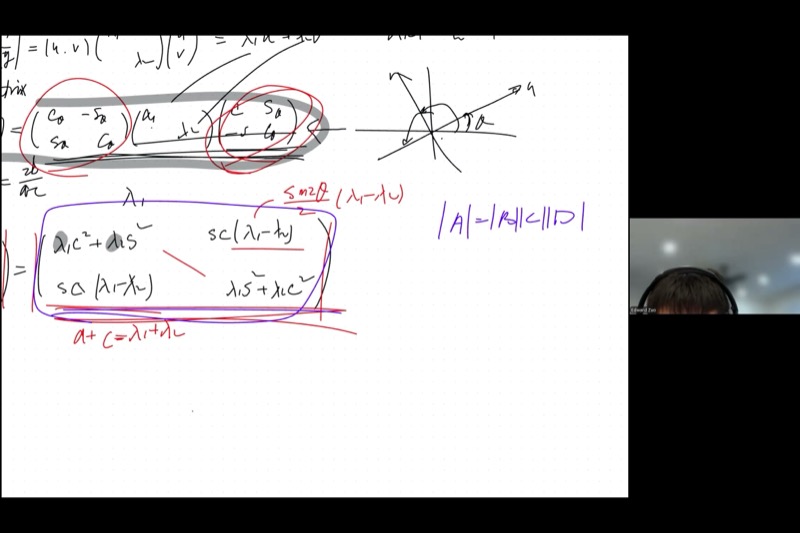
\[\begin{pmatrix} a & b \\ b & c \end{pmatrix} = \begin{pmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix} \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}\]
将所有矩阵相乘,可得:
\[a = \lambda_1 \cos^2\theta + \lambda_2 \sin^2\theta\] \[c = \lambda_1 \sin^2\theta + \lambda_2 \cos^2\theta\]
相加:
\[a + c = \lambda_1(\cos^2\theta + \sin^2\theta) + \lambda_2(\sin^2\theta + \cos^2\theta) = \lambda_1 + \lambda_2\]
勾股恒等式 \(\cos^2\theta + \sin^2\theta = 1\) 使 \(\theta\) 完全消去。迹在旋转下不变。
证明行列式不变性
直接计算展开矩阵的行列式。乘开后:
\[a = \lambda_1\cos^2\theta + \lambda_2\sin^2\theta, \quad c = \lambda_1\sin^2\theta + \lambda_2\cos^2\theta\] \[b = (\lambda_1 - \lambda_2)\sin\theta\cos\theta\]
行列式 \(ac - b^2\):
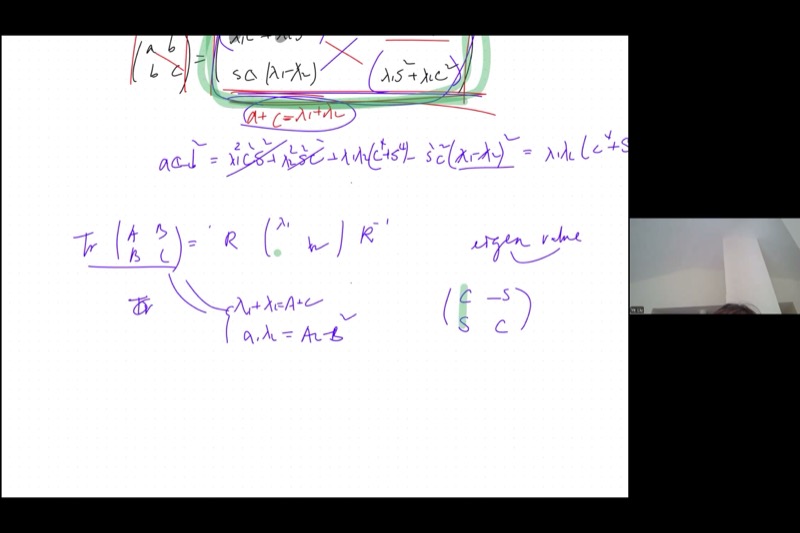
乘积 \(ac\): \[ac = (\lambda_1\cos^2\theta + \lambda_2\sin^2\theta)(\lambda_1\sin^2\theta + \lambda_2\cos^2\theta)\]
展开:
\[= \lambda_1^2 \cos^2\theta\sin^2\theta + \lambda_1\lambda_2\cos^4\theta + \lambda_1\lambda_2\sin^4\theta + \lambda_2^2\sin^2\theta\cos^2\theta\]
\[= (\lambda_1^2 + \lambda_2^2)\cos^2\theta\sin^2\theta + \lambda_1\lambda_2(\cos^4\theta + \sin^4\theta)\]
项 \(b^2\): \[b^2 = (\lambda_1 - \lambda_2)^2 \sin^2\theta\cos^2\theta\]
相减 \(ac - b^2\):
\[= \lambda_1\lambda_2(\cos^4\theta + \sin^4\theta) + [(\lambda_1^2 + \lambda_2^2) - (\lambda_1 - \lambda_2)^2]\sin^2\theta\cos^2\theta\]
由于 \((\lambda_1^2 + \lambda_2^2) - (\lambda_1 - \lambda_2)^2 = 2\lambda_1\lambda_2\),所以:
\[= \lambda_1\lambda_2(\cos^4\theta + \sin^4\theta + 2\sin^2\theta\cos^2\theta)\]
\[= \lambda_1\lambda_2(\cos^2\theta + \sin^2\theta)^2 = \lambda_1\lambda_2\]
角度完全消去,证实了 \(\det M = \lambda_1\lambda_2\)。
几何直觉:为什么行列式不变
行列式衡量矩阵列向量所张成的平行四边形的面积(或体积)。旋转不会拉伸或压缩任何东西——它只是转动。由于两个旋转矩阵的行列式都为 \(1\),总体缩放因子为 \(1 \times \lambda_1\lambda_2 \times 1 = \lambda_1\lambda_2\)。
这是行列式的分解定理:\(\det(ABC) = \det(A)\det(B)\det(C)\)。虽然我们在这个例子中通过直接计算进行了验证,但一般定理是一个深刻的结果,需要更高级的线性代数才能严格证明。
正交矩阵与特征向量
旋转矩阵作为一对向量
旋转矩阵可以看作两个列向量:
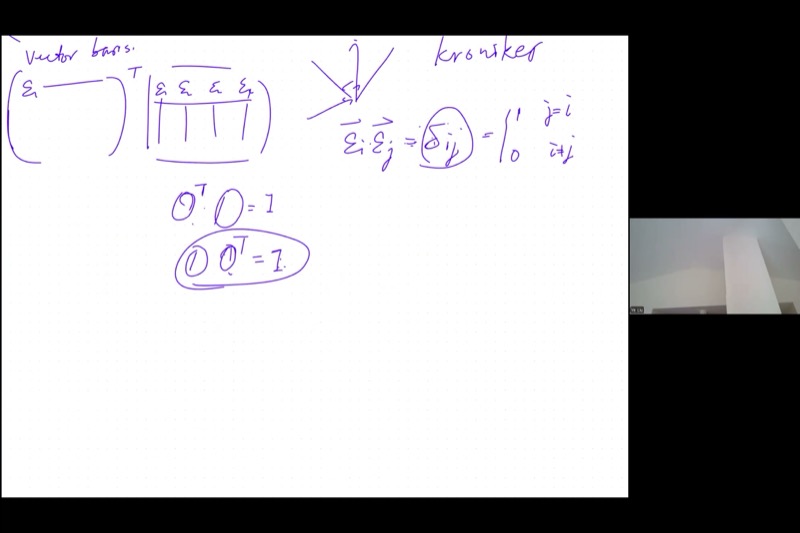
\[R(\theta) = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} = \begin{pmatrix} | & | \\ \vec{\varepsilon}_1 & \vec{\varepsilon}_2 \\ | & | \end{pmatrix}\]
其中 \(\vec{\varepsilon}_1 = \begin{pmatrix}\cos\theta \\ \sin\theta\end{pmatrix}\),\(\vec{\varepsilon}_2 = \begin{pmatrix}-\sin\theta \\ \cos\theta\end{pmatrix}\)。
这些向量具有三个显著性质:
- 单位长度:\(|\vec{\varepsilon}_1| = |\vec{\varepsilon}_2| = 1\)(由勾股恒等式)
- 正交:\(\vec{\varepsilon}_1 \cdot \vec{\varepsilon}_2 = \cos\theta(-\sin\theta) + \sin\theta\cos\theta = 0\)
- 斜率互为负倒数:\(\vec{\varepsilon}_1\) 的斜率为 \(\frac{\sin\theta}{\cos\theta} = \tan\theta\);\(\vec{\varepsilon}_2\) 的斜率为 \(\frac{\cos\theta}{-\sin\theta} = -\cot\theta = -\frac{1}{\tan\theta}\)
\(\vec{\varepsilon}_1\) 和 \(\vec{\varepsilon}_2\) 共同构成一个标准正交基——标准 \(\hat{i}, \hat{j}\) 方向的旋转版本。
拖动 \(\theta_0\) 滑块来旋转标准正交基 \(\vec{\varepsilon}_1\)(蓝色)和 \(\vec{\varepsilon}_2\)(红色)。它们始终保持垂直且单位长度。
正交矩阵的性质
由标准正交列向量构成的矩阵 \(O\) 称为正交矩阵。其定义性质为:
\[\boxed{O^T O = I \qquad \Longleftrightarrow \qquad O^{-1} = O^T}\]
原理: 计算 \(O^T O\) 时,\((i,j)\) 元素是点积 \(\vec{\varepsilon}_i \cdot \vec{\varepsilon}_j\)。由于列向量是标准正交的:
\[\vec{\varepsilon}_i \cdot \vec{\varepsilon}_j = \delta_{ij} = \begin{cases} 1 & \text{若 } i = j \\ 0 & \text{若 } i \neq j \end{cases}\]
这是克罗内克 delta——它产生单位矩阵。
我们证明了 \(O^T O = I\),但 \(O O^T = I\) 也成立吗?
从 \(O^T O = I\) 出发,右乘 \(O^T\):
\[O^T O \cdot O^T = O^T\] \[O^T (O O^T - I) = 0\]
由于 \(O^T\) 满秩(其行列式非零——它由独立向量构成),满足 \(O^T X = 0\) 的唯一矩阵 \(X\) 是 \(X = 0\)。因此:
\[O O^T - I = 0 \qquad \Longrightarrow \qquad O O^T = I\]
正交矩阵的左逆也是其右逆。
高维推广
这种结构自然推广。在 \(n\) 维中,正交矩阵 \(O\) 由 \(n\) 个相互正交的单位向量 \(\vec{\varepsilon}_1, \vec{\varepsilon}_2, \ldots, \vec{\varepsilon}_n\) 构成。性质 \(O^T O = I\) 仍然成立,\(O^{-1} = O^T\) 依然为真。克罗内克 delta 编码了所有成对点积:
\[\vec{\varepsilon}_i \cdot \vec{\varepsilon}_j = \delta_{ij} \quad \text{对所有 } i, j = 1, \ldots, n\]
特征值方程
现在我们到达了最终结论。从对角化开始:
\[M = E \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix} E^T\]
其中 \(E = \begin{pmatrix} \vec{\varepsilon}_1 & \vec{\varepsilon}_2 \end{pmatrix}\) 是特征向量组成的正交矩阵,两边右乘 \(E\):
\[M E = E \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix}\]
因为 \(E^T E = I\)。写成列向量形式:
\[M \begin{pmatrix} \vec{\varepsilon}_1 & \vec{\varepsilon}_2 \end{pmatrix} = \begin{pmatrix} \vec{\varepsilon}_1 & \vec{\varepsilon}_2 \end{pmatrix} \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix}\]
逐列展开右边:
\[\begin{pmatrix} \vec{\varepsilon}_1 & \vec{\varepsilon}_2 \end{pmatrix} \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix} = \begin{pmatrix} \lambda_1 \vec{\varepsilon}_1 & \lambda_2 \vec{\varepsilon}_2 \end{pmatrix}\]
逐列比较,我们得到两个独立方程:
\[\boxed{M\vec{\varepsilon}_1 = \lambda_1 \vec{\varepsilon}_1 \qquad \text{和} \qquad M\vec{\varepsilon}_2 = \lambda_2 \vec{\varepsilon}_2}\]
这就是特征值方程:矩阵 \(M\) 乘以特征向量 \(\vec{\varepsilon}\) 只是将该向量按其对应的特征值 \(\lambda\) 缩放。矩阵不会旋转或扭曲特征向量——只是拉伸(或压缩或反射)它。
对于 \(M = \begin{pmatrix} 3 & 1 \\ 1 & 3 \end{pmatrix}\):
特征值: 迹 \(= 6\),行列式 \(= 9 - 1 = 8\),因此 \(\lambda^2 - 6\lambda + 8 = 0\),解得 \(\lambda_1 = 4\),\(\lambda_2 = 2\)。
求 \(\vec{\varepsilon}_1\)(对应 \(\lambda_1 = 4\)):解 \((M - 4I)\vec{v} = \vec{0}\):
\[\begin{pmatrix} -1 & 1 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} v_1 \\ v_2 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \end{pmatrix} \implies v_1 = v_2\]
归一化:\(\vec{\varepsilon}_1 = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix}\)
验证: \(M\vec{\varepsilon}_1 = \begin{pmatrix} 3 & 1 \\ 1 & 3 \end{pmatrix}\frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix} = \frac{1}{\sqrt{2}}\begin{pmatrix} 4 \\ 4 \end{pmatrix} = 4 \cdot \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix} = 4\vec{\varepsilon}_1\)
类似地,\(\vec{\varepsilon}_2 = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ -1 \end{pmatrix}\) 是 \(\lambda_2 = 2\) 对应的特征向量。
非零矩阵的乘积可以为零
课堂上一个有趣的旁注:两个非零矩阵的乘积可以是零矩阵吗?
可以。 例如:
\[\begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix} \begin{pmatrix} 0 & 0 \\ 0 & 1 \end{pmatrix} = \begin{pmatrix} 0 & 0 \\ 0 & 0 \end{pmatrix}\]
两个因子都不是零,但它们的乘积是零。这是因为一个矩阵”投影”到的维度恰好被另一个矩阵所消灭。然而,如果一个矩阵满秩(行列式非零,所有列线性无关),那么 \(AX = 0\) 就迫使 \(X = 0\)。这就是为什么正交矩阵——其行列式始终为 \(\pm 1\)——永远不会产生这样的抵消。
课程关键帧
速查表
| 概念 | 公式 / 规则 |
|---|---|
| 对称矩阵 | \(M = \begin{pmatrix} a & b \\ b & c \end{pmatrix}\) 编码二次型 \(ax^2 + 2bxy + cy^2\) |
| 旋转角度 | \(\tan(2\theta) = \dfrac{2b}{a - c}\) |
| 迹(对角线之和) | \(\operatorname{tr}(M) = a + c = \lambda_1 + \lambda_2\) |
| 行列式 | \(\det(M) = ac - b^2 = \lambda_1\lambda_2\) |
| 特征多项式 | \(\lambda^2 - (a+c)\lambda + (ac - b^2) = 0\) |
| 特征值方程 | \(M\vec{\varepsilon} = \lambda\vec{\varepsilon}\) |
| 正交矩阵 | \(O^T O = O O^T = I\),因此 \(O^{-1} = O^T\) |
| 克罗内克 delta | \(\vec{\varepsilon}_i \cdot \vec{\varepsilon}_j = \delta_{ij}\) |
| 圆锥曲线分类 | 同号 \(\lambda\):椭圆;异号:双曲线;一个为零:抛物线 |
| 闵可夫斯基度量 | \(\lambda_1 = 1, \lambda_2 = -1\) 给出时空双曲几何 |
快速参考:对角化步骤
| 步骤 | 操作 |
|---|---|
| 1 | 计算迹:\(\lambda_1 + \lambda_2 = a + c\) |
| 2 | 计算行列式:\(\lambda_1\lambda_2 = ac - b^2\) |
| 3 | 解 \(\lambda^2 - \operatorname{tr}\lambda + \det = 0\) 求特征值 |
| 4 | 根据 \(\lambda_1, \lambda_2\) 的符号分类圆锥曲线 |
| 5 | (可选)由 \(\tan(2\theta) = 2b/(a-c)\) 求旋转角 \(\theta\) |
| 6 | 解 \((M - \lambda I)\vec{v} = \vec{0}\) 求特征向量 |